王尔申,蓝 彬,张 磊,徐 嵩,刘远强,雷 虹,刘达
(1.沈阳航空航天大学a.电子信息工程学院;
b.辽宁通用航空研究院,沈阳 110136;
2.沈阳飞机设计研究所 电磁环境效应航空科技重点实验室,沈阳 110035)
近年来节能减排在全世界的呼声越来越高,并且伴随着科学技术的发展,电动清洁能源也成为主流的研究方向[1]。在出行方面更是推行绿色出行理念,大力发展电动汽车、电动飞机等以清洁能源为动力系统的交通工具。相对于燃油飞机,电动飞机具有零排放、低噪声和节能等优点,这也引起世界各国和机构进行电动飞机的研制大浪潮[2]。在电动飞机的检测中,电动飞机自身电磁兼容性检测也是衡量电动飞机是否能正常飞行的重要因素[3]。
而民用航空器上的诸多机载电子设备是造成飞机复杂电磁环境的主要原因,会影响飞机生态系统的正常运行,甚至会危害飞行安全,所以航空器的电磁干扰及电磁兼容问题的研究就显得非常重要[4-6]。电磁干扰主要分为自然干扰和人为干扰两大类。自然干扰就是地磁环境所造成的干扰、地球空间雷电干扰以及太空空间环境射向地球的电磁噪声干扰,但在我们的测试中认为只存在正常的地磁干扰;
而人为干扰是由电机、大功率电路或其他动力系统所产生的电磁能量干扰[7-9]。电动飞机上的主要电磁干扰源为大功率燃料锂电池开合电路的稳恒磁场以及电动机转子高速旋转所产生的电磁干扰场[10-12]。电动飞机上的电磁敏感设备包括通信天线、通信传输线缆及元器件和监测航向的磁力计等。
因此,本文针对电动飞机大功率电池电路不同布局下所产生的快变电磁场干扰环境进行研究,并使用飞机磁力计以及磁罗盘对电磁干扰问题进行测试。本次测试分为两个部分:首先,通过使用Maxwell 3D软件建模仿真,在动力电池组快变时,观测叠加磁场内各点的磁场强度及方向变化情况;
然后,在室内进行动力电池对飞机磁力计的电磁干扰测试。通过仿真计算与真实测试的结合,观测在双重磁场叠加下的干扰情况,以便进一步研究如何抑制此类电磁干扰。
由于电动飞机电池组电路具有大电流、高电压的特性,在电池放电时会形成快变电磁干扰场。而为了有效地了解和研究电动飞机电磁兼容问题,本文将采用Maxwell 3D软件进行电动飞机电池电路的快变大电流辐射场的仿真建模计算。Maxwell 3D基于麦克斯韦微分方程,采用有限元离散形式,有着足够的准确性和快捷性[13]。稳恒磁场计算方程是麦克斯韦方程的特殊形式,在本次仿真中需要计算通电线圈与均匀磁场叠加后所产生涡流磁场对不同位置磁针所受磁场力的大小和方向,用以模拟电动飞机大功率电池电路工作时产生的磁场对飞机磁力计的影响情况。因此,本文将其引入到电磁场叠加检测中。
1.1 电动飞机电池电路电磁场计算原理
在本文中,由稳恒磁场的基本方程[14]

(1)
且空间无散场B可记为
B=∇×A
(2)
其中:H为磁场强度矢量;
B为磁感强度矢量;
J为线圈电流密度;
μ为空间媒质的磁导率;
A为矢量磁位;
∇为微分算子。
在本文使用均匀的磁导率介质,故矢量磁位的描述方程为
∇2A=-μJ
(3)
其中:∇2为拉普拉斯算子。
文中电池电路模型是线圈模型,为轴对称模型,对式(3)圆柱坐标系展开,该模型的电流密度Jφ和矢量磁位Aφ,关系式为
(4)

(5)
由于Maxwell 3D中的偏微分方程定义于三维直角坐标系下,该对称轴为x轴,式(5)中的r、x分别转换为z、y,可得
(6)
根据直角坐标系微分运算关系,可得
∇(z3∇u)=-z2μJφ
(7)
在对称轴处的矢量磁位Aφ等于0,又Aφ=ur,r=0,故对u可不限制;
在给定边界条件下,Maxwell 3D采用基本网格剖析,可计算出u的空间分布。
(8)
转换成Z-Y直角坐标系可得
(9)
其中:er、ex、ez、ey为坐标系偏微分方程对应的参数。
在稳恒磁场中,可通过该方法设置不同的参数来计算出线圈近场磁感强度矢量B的分布。
1.2 以磁场强度和方向为测试参考量可行性分析
将地球的磁场假设为一个条形磁体,由磁南极指向磁北极。因地球为不规则球体,故不同地理位置磁场强度通常在50~60 μT。但是在某一固定的地点可认为地球磁场线平行于地平线且磁场强度大小一致。
在某一个固定的地点,地球磁场矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。如果保持磁罗盘和当地的水平面平行,那么罗盘中磁力计的3个轴就和这3个分量对应起来,如图1所示。
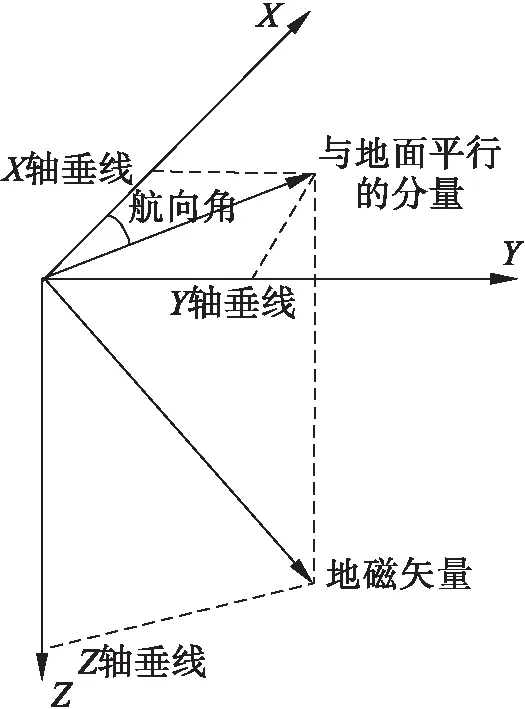
图1 地磁矢量分解示意图
实际上对水平方向的两个分量来说,它们的矢量和(即图中与地面平行的分量)总是指向磁北的。罗盘中的航向角就是当前方向和磁北的夹角。由于罗盘保持水平,用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以计算出航向角。
2.1 电动飞机仿真模型相关参数设置
文中设计的通电线圈是立体对称结构,采用Maxwell 3D坐标系的静磁场求解器。电动飞机导线通常采用铜制闭环双绞线对机载设备进行连接,故而本次仿真的线圈电路采用铜为材料建立,等效于电动飞机电池电路的线圈电路模型、测试某点电磁强度的磁针以及等效于地磁场的均匀静磁场的求解边界[15]。模型建立后,边界条件、材料、激励源、网格划分等,相关仿真参数设置如表1所示。

表1 静磁场求解参数表
如图2所示,Maxwell 3D仿真模型为电动飞机在地球表面所受磁场强度及磁场方向的理想模型,假设飞机飞行方向为X轴负半轴方向,模拟地磁方向为Y轴正半轴方向。该模型主要由两个通电铜线圈、两块测试磁针和等效地球表面磁场强度(50~60 μT)的均匀磁场(取55 μT=44 A/m),均匀磁场方向为Y轴正半轴。主要测试两组电流(110 A、120 A)快变下,其分别对应线圈不同角度下所产生的电磁场和均匀磁场叠加后,磁针所受磁场强度和方向情况,以判断磁针指向偏离。

图2 电动飞机电池线路系统仿真模型
2.2 电动飞机电池磁场仿真与分析
本次仿真采用两块磁针分别代替电动飞机的磁力计和磁罗盘,使用通电线圈表示电动飞机电池组。磁针所受磁场强度大小及方向由Maxwell 3D软件计算和表示出来。
2.2.1 均匀磁场中磁针测试分析
当两等效线圈电流为0 A,在计算边界中只存在和地球地表磁场强度相当的均匀磁场,如图3所示。

图3 电动飞机电池组模型在均匀磁场强度及方向
由图3可知,磁针于均匀磁场中的所受磁场强度与方向,磁针X、Y和Z方向上的所受磁场强度如表2所示。再结合图1中的地磁分解示意图可知磁针原始角度,如表3所示。在均匀磁场中,磁针主要的磁场强度方向为Y轴正方向,即磁场方向。

表2 电动飞机均匀磁场中所受影响仿真数据

表3 均匀场中磁针角度
2.2.2 叠加磁场中磁针测试分析
本文针对RX4E锐翔电动飞机进行测试,在没有任何电磁屏蔽条件下进行模拟仿真。当两线圈中某一个的电流值为0 A时,另一个在电流I=110 A、220 A时分别观测计算域中磁场分布情况,应用Maxwell 3D对场域和两块测试磁针进行三维可视化模拟,可以非常直观清晰地观察到场内各点所对应的磁场大小和方向,如图4以及表4、表5所示。

表4 电动飞机在叠加磁场中磁力计仿真数据表(磁针1)
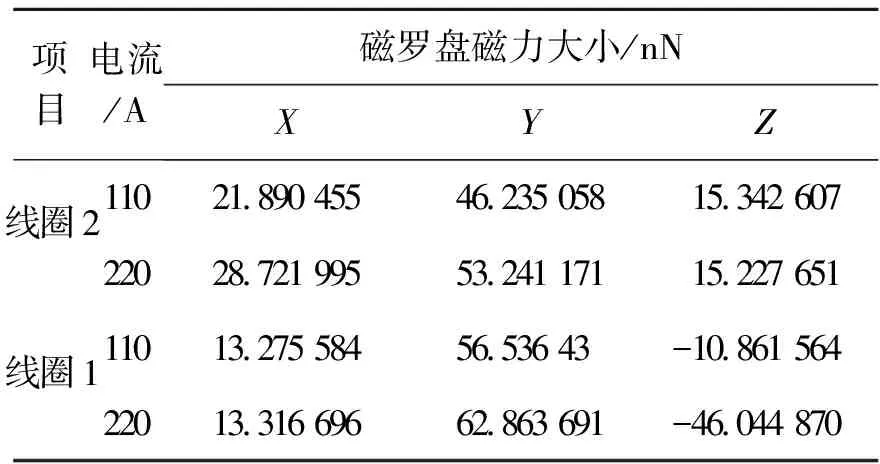
表5 电动飞机在叠加磁场中磁罗盘仿真数据表(磁针2)

图4 等效模型在叠加磁场模拟情况图
当只有后电池组工作时,由图4a、4b可以看出,其主要影响的是后机身的磁力计,从X、Y、Z面的磁场强度及受磁力分布情况看,前机身的磁针基本不受影响,所受磁力大小较为均衡。由仿真可知,磁针2在X、Y面的所受磁场强度远大于Z面,则磁力计指针更加偏向X、Y面磁场的矢量和方向。同理,当只有前电池组工作时,由图4c、4d可知,其对后机身的磁力计影响较小,对磁罗盘影响较大,且所受磁场力方向为Y方向。
结合上述内容分析,可计算出在电池组工作时,前后磁针工作航向角,如表6、表7所示。

表6 后电池组放电对磁力计的影响

表7 前电池组放电对磁力计的影响
由上述数据表可知,电流强度越大,所产生的影响也就越大。而在电动飞机电路布局中,在两电池组距离一定的情况下,电池组工作所产生的稳恒磁场对较近的磁力计影响较大,并且电路闭合环路平面与地磁场相重合,且磁力计位于环路上方时,对于磁针的磁力影响较小。因此,动力电池及负载的布局可减小电磁场对磁感设备的影响。
通过仿真建模实验后,本次场地模拟测试的布局采用电池组闭合电路的电流方向与地面平行且磁力计位于环路上方的布局,详见图5所示。
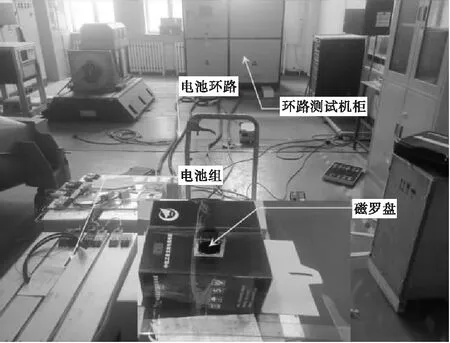
图5 电动飞机电池电路磁干扰测试环境图
现场使用GMU44磁力计进行磁场测试,GMU44对重金属、导线以及易产生电磁场的结构和设备比较敏感。CMU44磁力计在静止状态的航向误差为±2°,飞行状态实时航向误差为±6°。电动飞机基本参数如表8所示。电动飞机安装前后两个动力电池组,每个电池组包括2组96串锂电池,每组有100 AH容量,合计整机电池组总共可以提供200 AH容量给飞机电机,进而驱动飞机螺旋桨旋转产生拉力。由于这两个机载动力电池组的输出具有高电压、大电流的特点,因此给整机航电系统的电磁兼容设计带来较大挑战,故而进行本次测试。

表8 电动飞机基本参数表
3.1 电动飞机的实测环境搭建
在实验室进行动力电池组对磁罗盘的电磁干扰测试。具体安装位置参数为:X轴指向机头,Y轴指向右机翼,Z轴指向机顶,原点在Catia绘图原点,前电池组左下棱角坐标(2 071,-342,-368);
仪表舱磁罗盘坐标(2 643,0,377),后电池组左下棱角坐标(5 222,-342,-360),后机身磁力计坐标(6 824,0,-252)。前后电池组外形尺寸:X轴向长613 mm,Y轴向宽684 mm,Z轴向高576 mm。
通过三维坐标计算出前电池组和仪表仓的磁罗盘距离约为999.586 mm,以前电池组坐标为原点建立空间坐标系,磁罗盘位于俯仰角度约为48.27°,水平分量角度约东偏北59.12°的位置;
后电池组到后机身磁力计距离约1 641.655 mm,以后电池组坐标为原点建立空间坐标系,磁力计位于俯仰角度约为3.772°,水平分量角度约为东偏北约77.95°的位置。前电池组到机后磁力计距离约为4 766.700 mm,后电池组到机前磁力计为2 703.955 mm。
磁力计在同时感知地球磁场和飞机电池等机载设备电磁场时,受到地球磁场和飞机电池产生磁场角度差的影响,还受到机械设备到磁力计距离的影响。因此当磁力计距离电池组相对较远时,磁力计不受该电池组所产生磁场的干扰。本次测试以某一测试点电池组电流为0 A时的磁力计刻度为基准值,可以保证在误差值相同的测试点环境下测试电磁场变化引起的磁力计刻度变化。
3.2 电动飞机的实测结果分析
前电池组对2 m外磁力计电磁干扰测试如表9所示。当磁力计与电池组距离为2 m时,可认为不论电路电流多大都不对磁力计造成干扰。前电池组到机后磁力计距离约为4.7 m,后电池组到机前磁力计为2.7 m,故而前电池组产生电磁场对后磁力计没有影响,后电池组产生电磁场对前磁罗盘也不造成影响。
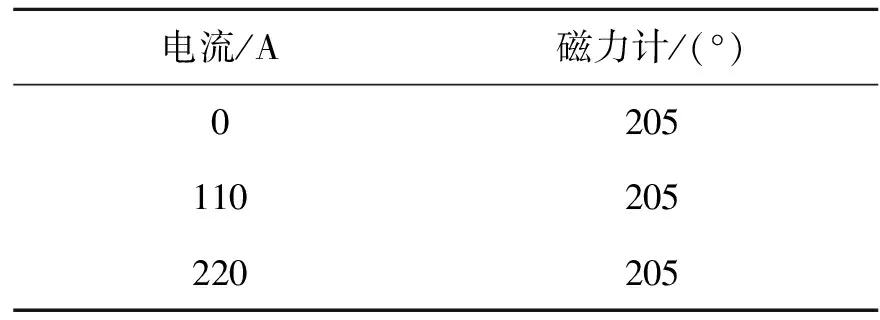
表9 前电池组对2 m外磁力计电磁干扰测试
由表10可知,后电池组放电电流为220 A时,磁力计(试验时用磁罗盘代替)磁航向指示值由207°变为209°,电磁干扰影响为2°;
后电池组放电电流为110 A时,磁力计(试验时用磁罗盘代替)磁航向指示值由207°变为208°,电磁干扰影响为1°。
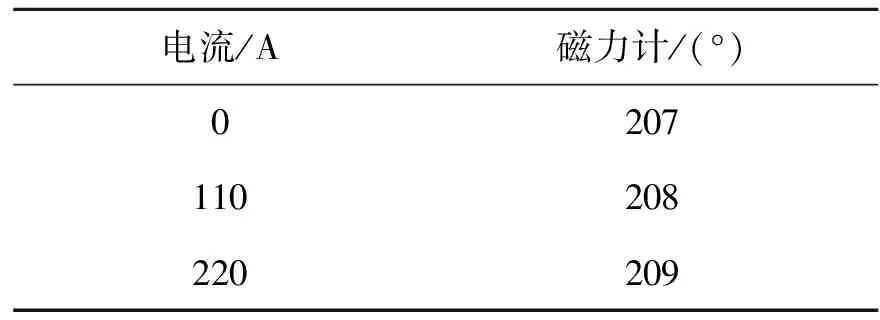
表10 电动飞机后电池组放电对磁力计的影响
由表11可知,前电池组放电电流为220 A时,磁罗盘磁航向指示值由185°变为195°,电磁干扰影响为10°;
前电池组放电电流110 A时,磁罗盘磁航向指示值由185°变为190°,电磁干扰影响为5°。
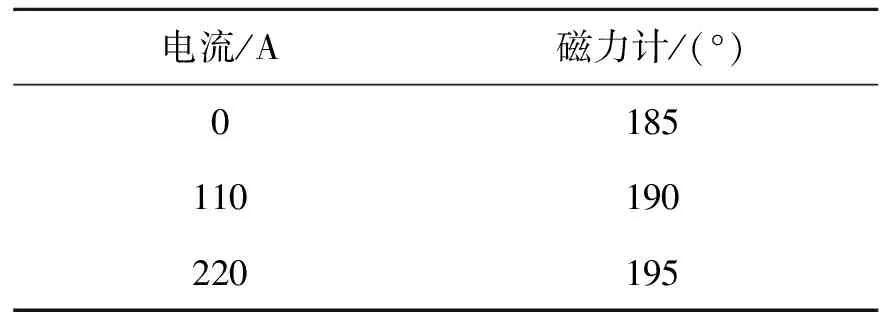
表11 电动飞机前电池组放电对磁罗盘的影响
由表9~11结合仿真建模数据可知,电流越大,产生的影响越大。磁力计或磁罗盘与电池组环路距离越近,所受影响越大。因此,合理安排动力电池电路的布局可减小电磁场对磁感设备的影响。
本文针对在电动飞机未进行其他磁航向补偿时的电池电路磁场干扰问题进行了Maxwell 3D建模仿真,并对电动飞机实际电池组干扰进行了测试,旨在完成未进行补充时,通过电池电路结构布局、将电磁影响降低。通过仿真建模和实验测试可以看出在电池电路放电时,电路周围的磁场会产生一个稳态干扰磁场,磁场强度与电池放电大小有关,而且对电动飞机磁力计以及磁罗盘的影响主要与安装距离和角度有关。文中研究的结果为电动飞机电磁兼容性设计提供了较好的参考依据,在飞机设计时,对电池组安装进行角度与距离的优化可有效减小电池稳恒电磁场的干扰。
猜你喜欢磁力计磁针罗盘磁针磁力研磨工艺对发动机涡轮叶片表面质量的试验研究航空制造技术(2021年18期)2021-10-15六轴IMU补偿的磁力计动态稳定校准仪表技术与传感器(2021年1期)2021-02-25自制指南针小猕猴智力画刊(2020年2期)2020-03-08基于低功耗蓝牙的磁力计在线校准系统设计中国科技纵横(2019年8期)2019-06-19基于磁阻传感器的车载型磁电子罗盘的设计电子制作(2018年19期)2018-11-14多传感器组合的行人航位推算方法研究现代电子技术(2017年12期)2017-06-23不宜上课作文·初中版(2017年2期)2017-03-06由2016年南京市一道关于“小磁针”的物理中考题想起的中学物理·初中(2016年12期)2016-09-10印尼《罗盘报》之中国国家形象新闻传播(2015年9期)2015-07-18像水一样柔软北京文学·中篇小说月报(2009年1期)2009-08-13